applied acoustics‘ Acoustic Positioning Product Line Manager and Support Engineer Ben Darling discusses the issues around shallow water tracking, and how USBL range, accuracy and operation can be maximised.
What are the primary acoustic propagation challenges encountered when tracking objects in shallow water, and how do they affect positioning accuracy?
The main challenges associated with USBL subsea positioning in shallow water include multi-path acoustic interference, acoustic noise, sound velocity and acoustic signal path geometry.
The main issue is multi-path where acoustic signals bounce off the sea surface and seabed as well as other objects and structures in shallow water environments. The effects of this are that there is higher acoustic noise, reducing the positional stability of a system by adding acoustic in-band noise and generating multiple acoustic paths.
The other key issue in shallow water tracking is the changes of sound velocity (speed of sound), there are 3 key factors that affect sound velocity; temperature, salinity and depth. In shallow water the temperature and salinity can vary more than in deeper water particularly close to the surface and in coastal areas.
Freshwater and brackish water where rivers enter the ocean or from land and fresh water run off particularly in the spring in the northern hemisphere when ice and snow starts to melt can change the temperature and salinity considerably. As can other seasonal effects, sea temperatures can fluctuate greatly throughout the year. This means the signals returning to the USBL receiver speed up and slow down on its travel to the USBL system, causing errors in range, which then makes it challenging to calculate accurate positioning or indeed impossible if the discrepancy is too large, (depth in shallow water causes less of a speed of sound change).
Acoustic signal path geometry is also critical for shallow water USBL tracking, without a direct acoustic signal path the USBL transceiver positioning quality is degraded increasing the risk of multi-path interference.
How does multipath interference impact USBL accuracy, and what technologies or signal processing techniques can mitigate these effects?
Typically, multi-path impacts USBL performance by reducing the signal to noise ratio (SNR) as a result of the increase in in-band acoustic noise. USBL systems require good SNR levels to provide a high degree of confidence in the resulting positional solution. Multi-path also impacts the orientation of the resulting acoustic reflections detection at the USBL transceiver, which can result in errors in the calculation of the position.
To mitigate these effects a wide band spread spectrum acoustic signal is implemented, this improves the receiver detection performance of the transceiver increasing the effective SNR and noise tolerance. Below is a comparision between CW tone and aae Spread Spectrum response, the CW tone on the left has wider frequency detect bandwidth and lower signal level in comparison to the Spread Spectrum on the right. The increased signal level and narrow band width of the spread spectrum acoustic signal improves the accuracy and repeatability of position.
-
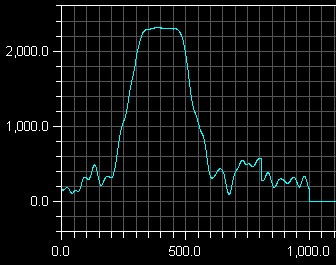
- CW (tone) detection, bandwidth, and relative level.
-
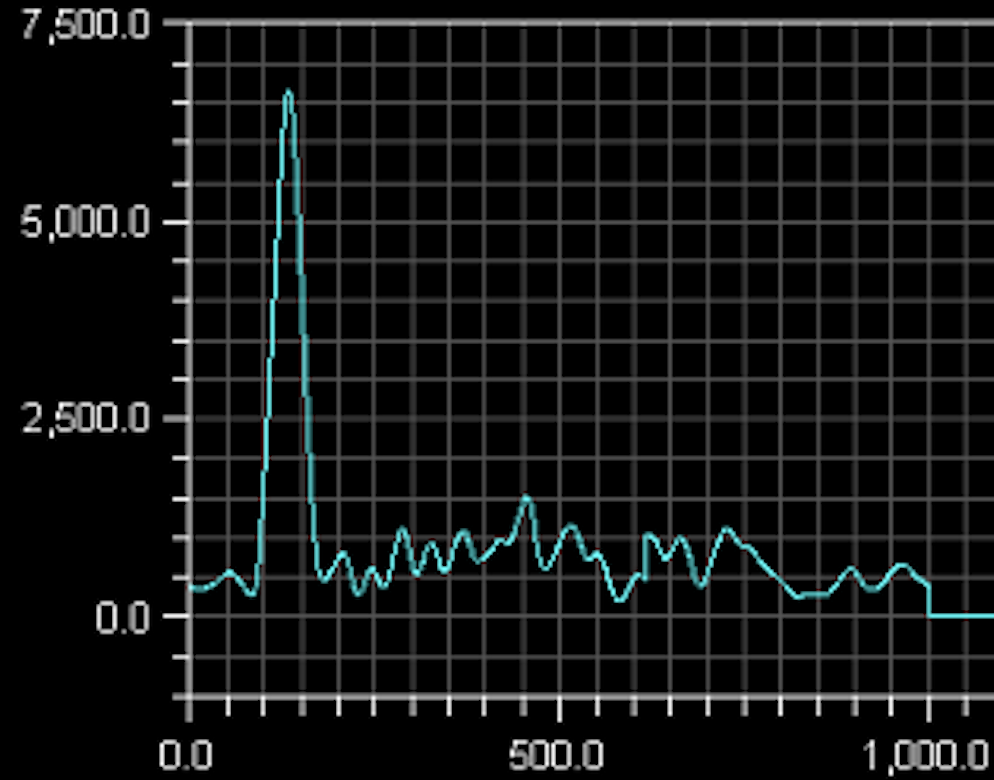
- Sigma 2 detection, bandwidth, and relative level.
What steps can operators take to maximise the effective range of USBL systems in challenging environments?
There are a number of steps that can be taken to improve the range of a USBL system operating in challenging shallow water environments.
Beacon and transceiver selection are key to optimising USBL performance in shallow water. Tracking geometry is a factor. Ensure the correct beacon is selected for the application as beam pattern and transmit power level are key factors to be considered in maximizing system SNR and acoustic geometry.
To maximise range in shallow water adding target depth aiding so the accurate Z (depth) is known to reduce the need to calculate this parameter making it much easier to calculate the true position, with a 2D solution.
There is a balance to be achieved between enough signal in the water that the transceiver can pick up the true acoustic return, and not swamping the receiver with noise and reverberation. This is referred to as the signal to noise ratio, the signal to noise ratio can also be improved by using digital acoustic signals or spread spectrum signals which are a coded message with a wider bandwidth, this spreads the signal over the frequency domain making the signal less susceptible to interference and improving the valid detection of position. In shallow water environments it may also be necessary to slow down the interrogation rate of the tracking system so that the sound from previous interrogations and replies can dissipate. We can also adjust the gain (amplification) of the signal and the detection threshold on the signal so we can tweak operational settings to improve acquisition in challenging environments.
The final step that may be able to improve range and operation in shallow water environments is to open the transducer face by tilting the transceiver towards the operation, changing the array from being planar and horizontal to being at an angle will reduce masking on the receive elements and change the tracking angles improving the quality of signals and the time between receptions on each element making it easier to calculate a positional solution. applied acoustics can provide tilt adaptors to do this.
What are the key differences in calibration and setup for USBL tracking in shallow water versus deep water operations?
In shallow water operations noise can come from reflections off the bottom, or surface of the water column, in deeper water the sound scatters and diminishes so this is less of an issue.
Vessel thrusters and wash from the ship can cause noise. Sea state and weather conditions can cause surface noise that propagates through the water column, also reflecting off surfaces and making a hostile environment for acoustics so the transceiver should be mounted away from these locations. A good tip is to get the transceiver deeper, and away from surface noise such as rainfall or waves and wake of a vessel, where practically possible.
A beacon should be fitted on a suitably weighted frame or anchor so it is stationary and not moving and ideally free from anything that can cause multipath, previously spoken about.
Slow down the interrogation rate of the USBL system to allow multipath signals to dissipate before sending the next interrogation. If working in deeper open water but in shallow operations then running acoustically as fast as possible should not be a problem. When working deeper then the time the signal takes to acoustically travel through the water will limit the interrogation rate.
It is normally recommended that when performing a dynamic USBL calibration the tracking radius is limited to 2x water depth to optimize the acoustic angle of instance for acoustic performance. When operating in shallow water this can be challenging depending on the vessel, water depth and weather conditions. This is often one of the key practical limitations to be considered when planning a shallow water USBL calibration.
In shallow water USBL calibrations, the resulting acoustic ranges are often <50m; this results in tight acceptance tolerance of the solution. The USBL system will require integrated high-accuracy GNSS and attitude corrections to achieve the desired performance.
How does applied acoustics design its USBL technology to handle the complexities of tracking in highly reflective, acoustically challenging shallow waters?
applied acoustics has developed acoustic protocols, positioning algorithms, system hardware and integrated INS systems to optimise performance across all ocean depths. Initial Easytrak systems were designed for shallow water operations, and we have continued to develop to enhance system performance in shallow water environments. The development of the acoustic protocols, positioning algorithms and filters are key to the continued improvement of shallow water performance.
More recently, we released our third iteration of spread spectrum (Sigma 3) with the Easytrak Vesta USBL system, combining the Sigma 1 and Sigma 2 coding technology to have the shorter pulse width of Sigma 1 and the depth aiding from Sigma 2. In Q2 of 2025, Sigma 3 will be rolled out across the Nexus 2 and Pyxis USBL systems and the 1100 series Mini beacons for enhanced shallow water operations.